目次
今回は、タミヤの楽しい工作シリーズのブルドーザをマイコンで制御して動かしてみます。
準備するもの

○ 用意するもの
| 名前 | 個数 |
| タミヤ 楽しい工作シリーズ No.104 ブルドーザー工作基本セット | 1個 |
| タミヤ 楽しい工作シリーズ No.157 ユニバーサルプレート 2枚セット | 1個 |
| モータシールド | 1個 |
| 電池ボックス | 1個 |
| 単三電池 | 2本 |
| モバイルバッテリー | 1個 |

キャタピラーの利点
今回はブルドーザを、プログラミング通りに動かすことを目指します。ブルドーザを
利用する利点としては、キャタピラーを利用していることです。
右のキャタピラーと左のキャタピラーを同じ方向に動かせば前進、逆方法に動かせば、
左右に曲がることができます。普通の車であれば、前輪の向きを制御する必要があり
ますが、キャタピラーを使用することで、方法変換の制御が簡単に行えます。
モータシールドの利点
また今回はモータシールドを使用します。シールドというのは、Aruduinoの拡張ボードで
Aruduinoの上から、はめ込む形で使用します。ブレッドボードへの配線がないので工作が
すっきりします。
ブルドーザの組み立て
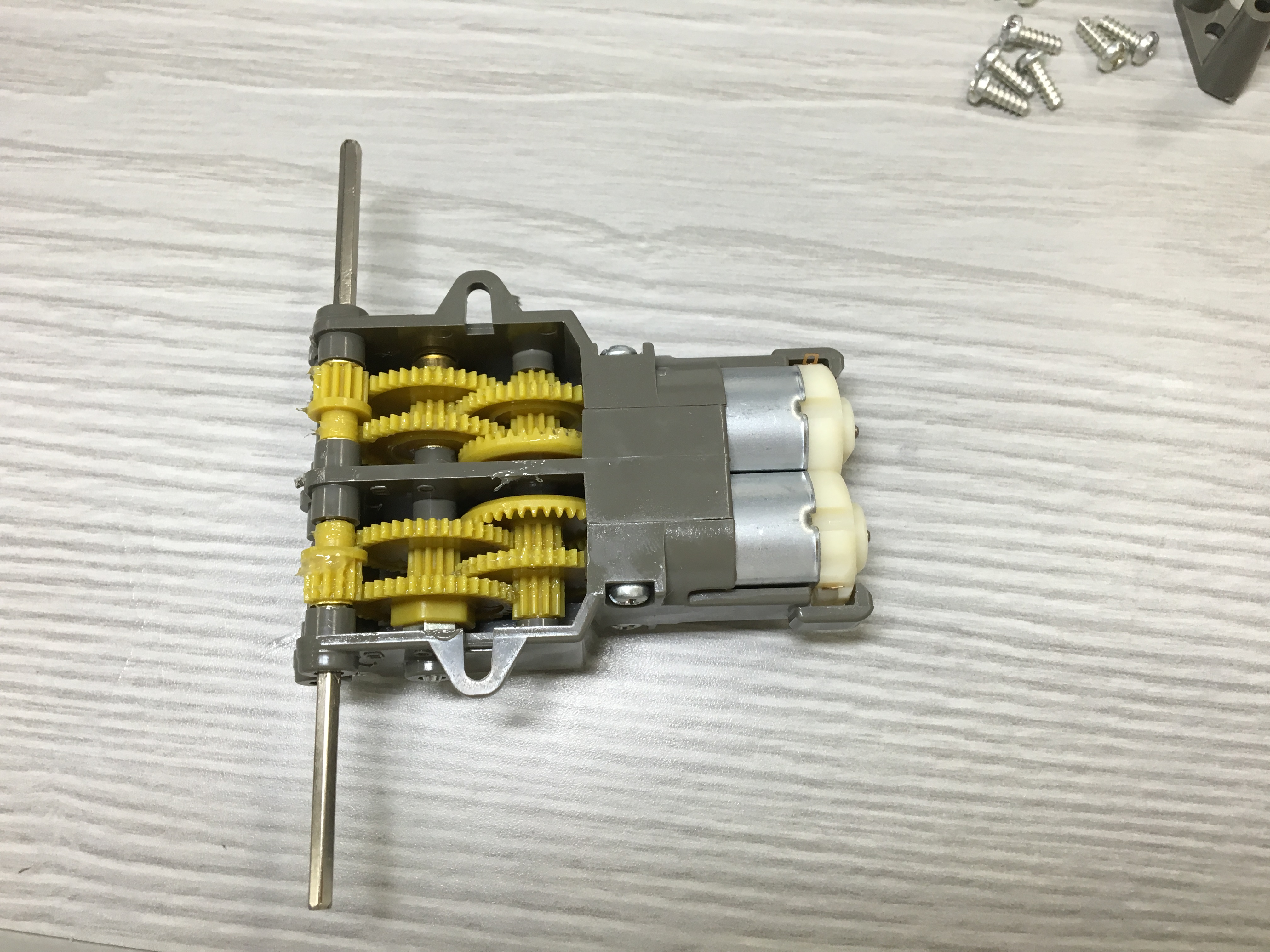
(1)まずはギアボックスを組み立てます
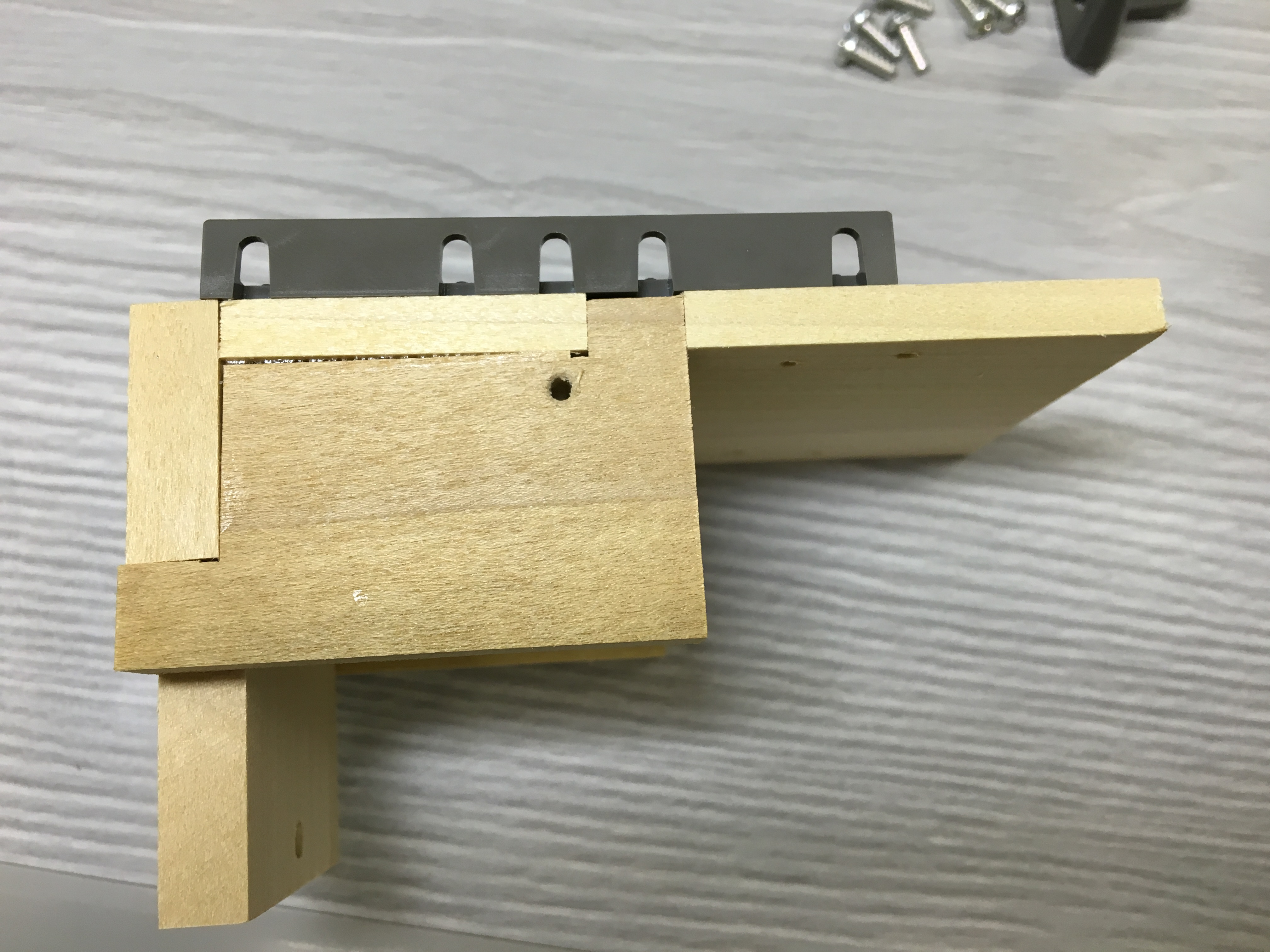
(2) 次に車の土台を作成します。
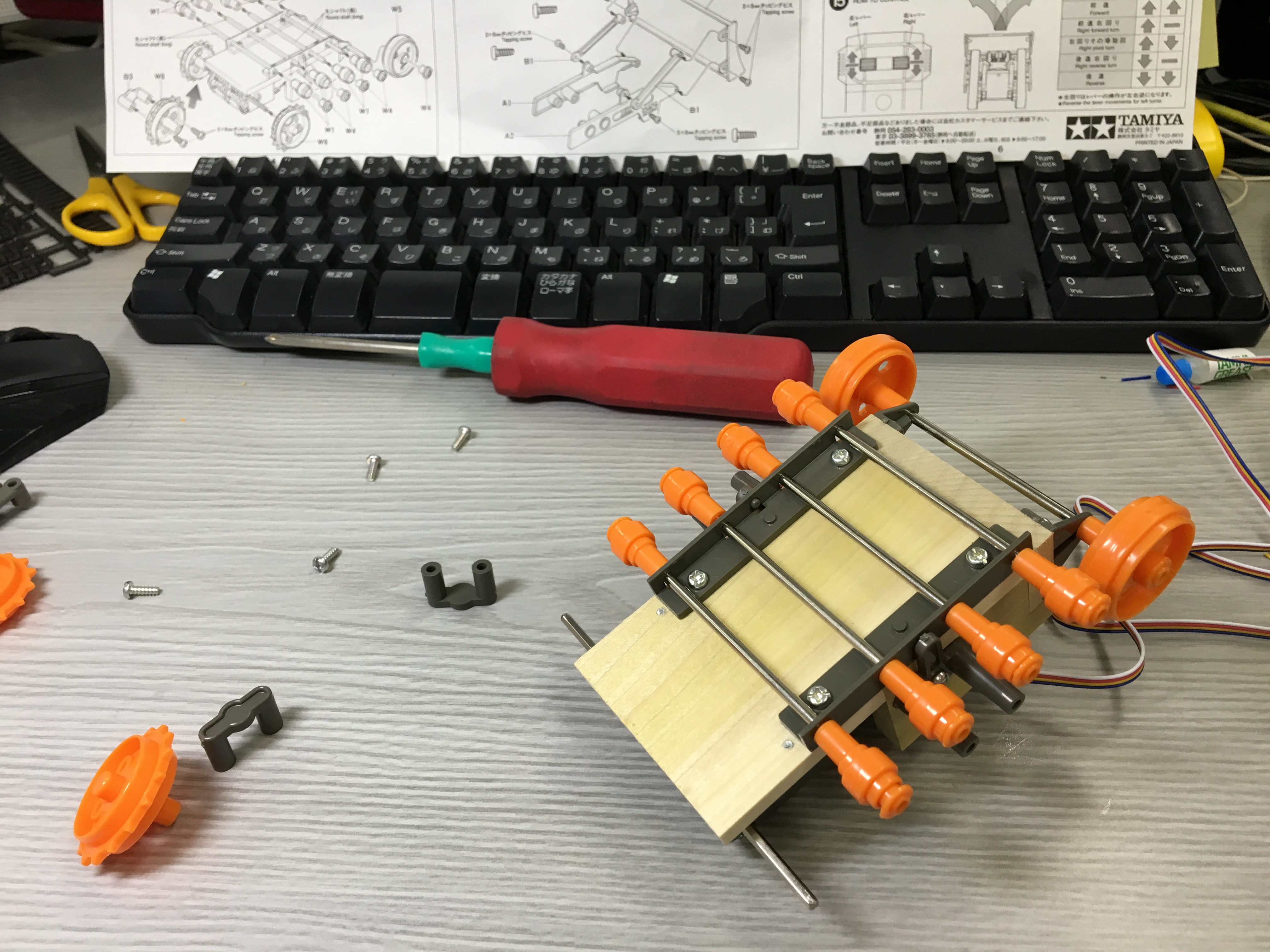
(3)タイヤ部分を組み立てます。
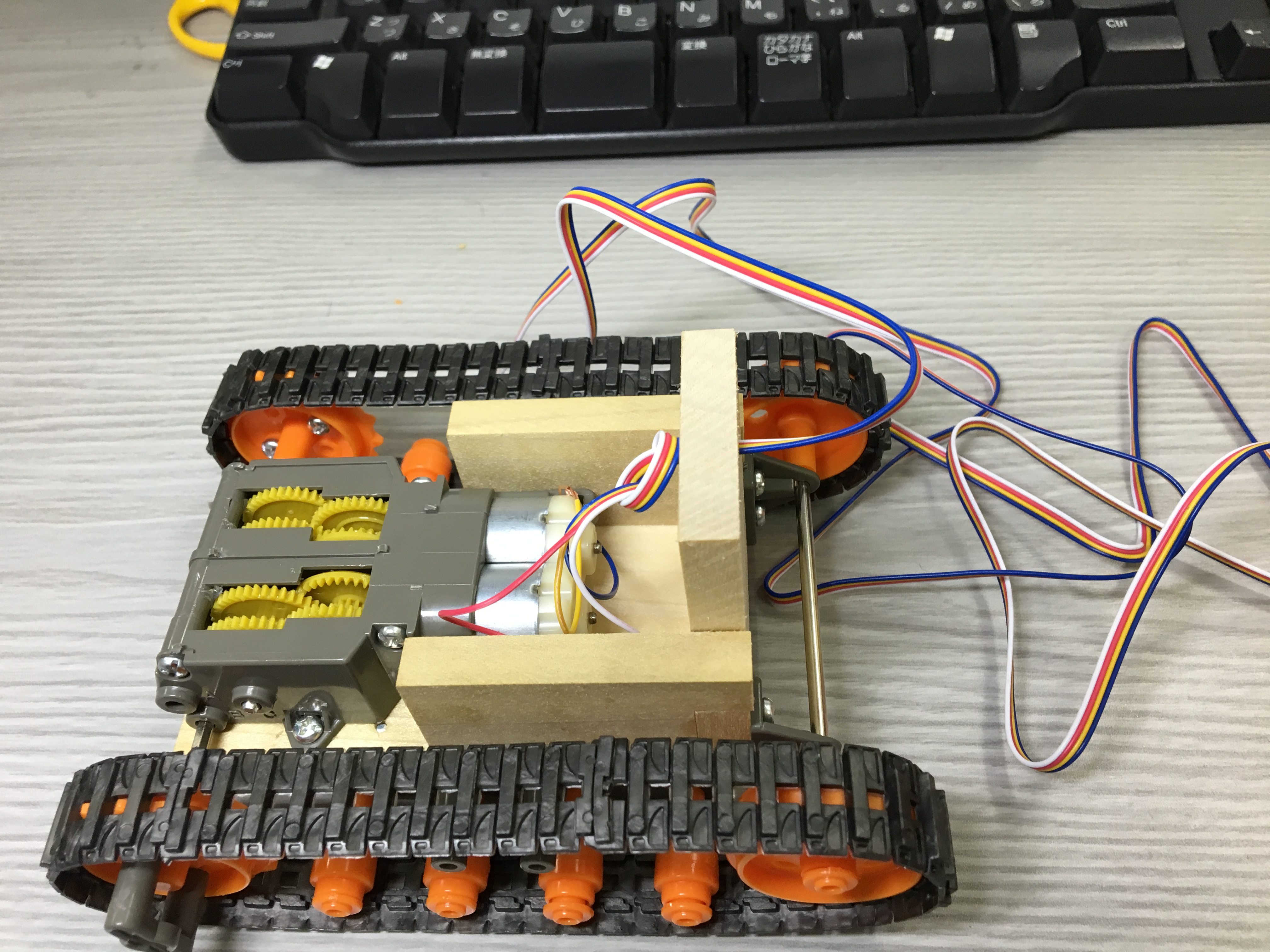
(4)車にギヤボックスを載せ、キャタピラをタイヤにはめ込んで完成です。
今回はキャタピラーを動かすのが目的なので、ブルドーザのアーム部分は組み立てません。
コントローラに電池を入れて動作確認してみます。ちゃんと前進・後退・方向変換ができることを確認しました。
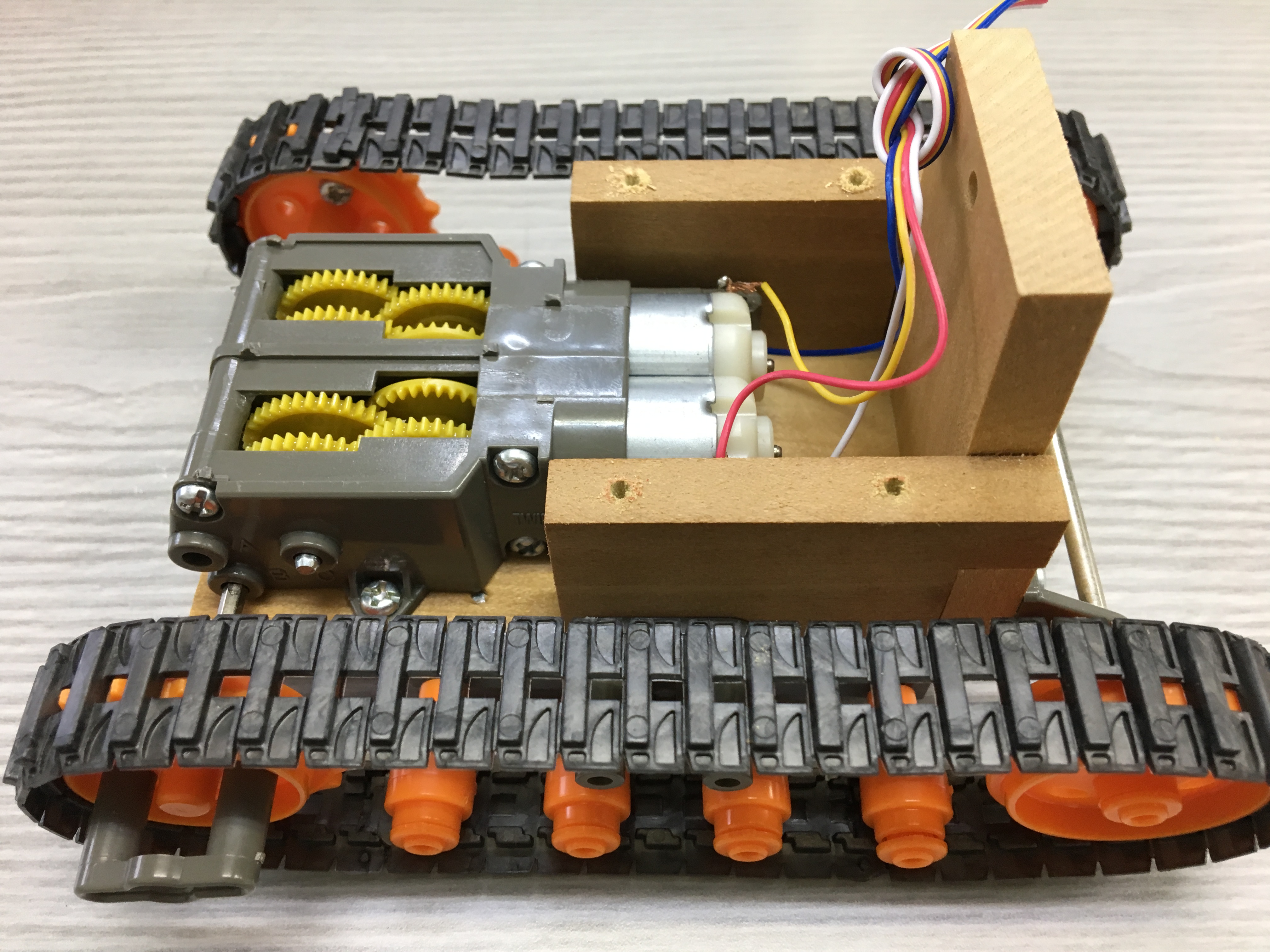
マイコン部品の搭載
(1)車の土台にユニバーサルプレートを取り付けるための穴をあけます。
またモータからコントロールボックスに伸びる4本の線を適当な長さに切っておきます。
(2)Aruduinoの上にモータドライブを差し込みます。
(3)車の土台にユニバーサルプレートを取り付け、その上にAruduinoと電池ボックス、
モバイルバッテリーを載せて固定します。
(今回は配線の長さを失敗してAruduinoが斜めになったので、両面テープで固定しました。)
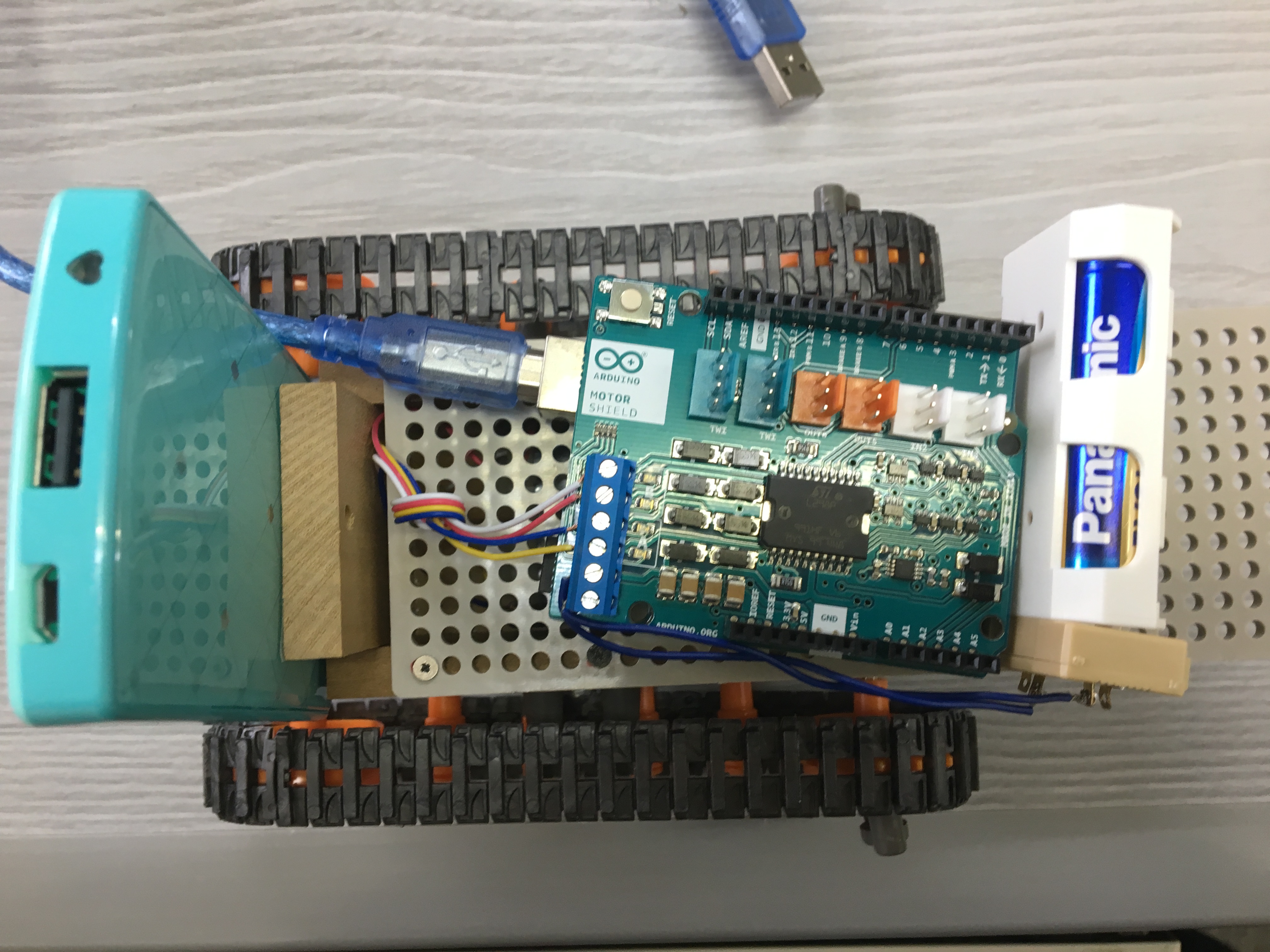
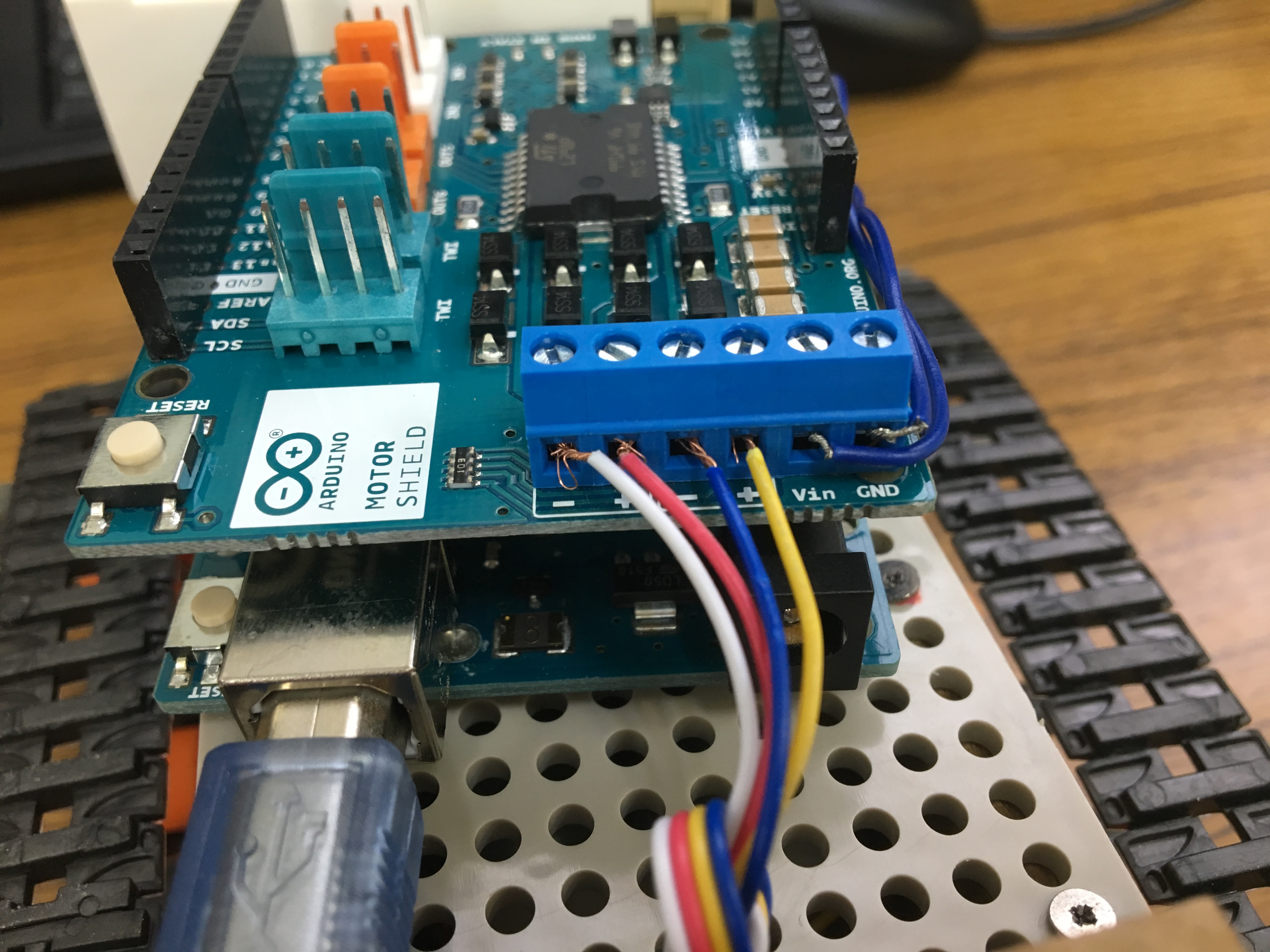
(4)モータドライブと左右のモータ及び電池ボックスを配線します。
プログラムの作成(Arduino)
(1) Arduino側のプログラムを作成します
void setup() {
// モーターAの制御用ピン設定
pinMode(12, OUTPUT); // 回転方向 (HIGH/LOW)
pinMode(9, OUTPUT); // ブレーキ (HIGH/LOW)
pinMode(3, OUTPUT); // PWMによるスピード制御 (0-255)
// モーターBの制御用ピン設定
pinMode(13, OUTPUT); // 回転方向 (HIGH/LOW)
pinMode(8, OUTPUT); // ブレーキ (HIGH/LOW)
pinMode(11, OUTPUT); // PWMによるスピード制御 (0-255)
}
void loop(){
// モーターA: フルスピード正転
digitalWrite(12, HIGH);
digitalWrite(9, LOW);
analogWrite(3, 255);
// モーターB: フルスピード正転
digitalWrite(13, HIGH);
digitalWrite(8, LOW);
analogWrite(11, 255);
// 2秒間上記設定で回転
delay(2000);
// モーターA: フルスピード逆転
digitalWrite(12, LOW);
digitalWrite(9, LOW);
analogWrite(3, 255);
// モーターB: フルスピード逆転
digitalWrite(13, LOW);
digitalWrite(8, LOW);
analogWrite(11, 255);
// 2秒間上記設定で回転
delay(2000);
}
マイコンボードへの書き込み
(1) 作成したプログラムをコンパイルします
(2) マイコンボードへ書き込みます
動かしてみる
(1)動かしてみます
とりあえず完成です。モータからの線を短くしすぎたので、Aruduinoが斜め
になったのと、モバイルバッテリーが両面テープで支えきれずにとれたので
最後はデモをするのを優先させて黒のビニールテープで止めたのでブサイク
になってしまいました。
またモータシールドについては、以下の記事を参考にさせていただきました。
ありがとうございました。